 NAVIGAZIONE AEREA
di:
Enrico Della Gatta
NAVIGAZIONE AEREA
di:
Enrico Della Gatta
Capitolo 11 - Navigazione Stimata
11.1 Elementi basilari
A questo punto della trattazione è utile rivedere le definizioni dei principali parametri che devono essere considerati nella Navigazione stimata.
Luogo di posizione: insieme di punti della superficie terrestre, tutti e solo i quali godono di una determinata proprietà geometrica, accertabile a mezzo di misura, e che necessariamente contiene la posizione dell'osservatore.
Prua (Heading): è la direzione in cui è puntato l'asse longitudinale dell'aereo rispetto alla direzione del Nord. La Prua vera è riferita al Nord vero, la Prua magnetica è riferita al Nord magnetico, la Prua bussola è riferita al Nord bussola, la Prua griglia è riferita al Nord griglia.
Declinazione magnetica: è l'angolo formato tra la direzione del Nord geografico e la direzione del Nord magnetico. La declinazione magnetica è Est o positiva se la direzione del Nord magnetico è ad Est del Nord geografico; è Ovest o negativa nel caso contrario.
Deviazione magnetica: è l'angolo formato tra la direzione del Nord magnetico e la direzione del Nord bussola. La deviazione magnetica è Est o positiva se la direzione del Nord bussola è ad Est del Nord magnetico; è Ovest o negativa nel caso contrario.
Rotta (Course): è la direzione riferita al Nord lungo la quale si intende far muovere l'aereo.
Rotta (Track): è la direzione effettiva di movimento di un aereo sulla superficie terrestre riferita al Nord. Course e Track differiscono per il fatto che la Course è una Rotta che deve ancora essere percorsa, la Track è una Rotta già percorsa. Il riferimento può come sempre essere il Nord vero, magnetico o bussola. Per la Navigazione in zone polari il riferimento può essere il Nord griglia.
Angolo di correzione del vento (Crab angle): è l'angolo chiamato anche “wind correction angle” formato tra la direzione della Rotta che si intende percorrere (Course) e la direzione dell'asse longitudinale dell'aereo (Heading). È l'angolo di cui deve essere corretta la Prua dell'aereo verso la direzione di provenienza del vento al fine di percorrere la Rotta desiderata.
Angolo di deriva o scarroccio (Drift angle): è l'angolo formato tra la direzione nella quale si intende far muovere l'aereo (Course) e la Rotta effettiva (Track), nel caso in cui l'aereo mantiene una Prua uguale a quella che sarebbe necessaria per percorrere la Rotta in assenza di vento, e quindi senza apportare alcuna correzione per l'effettivo vento presente.
IAS (Indicated Air Speed): è la velocità indicata sull'anemometro, non corretta per errori strumentali, compressibilità ed errori dipendenti dal posizionamento dei sensori.
CAS (Calibrated Air Speed): è la IAS corretta per tutti gli errori cui essa è soggetta.
TAS (True Air Speed): è la vera velocità dell'aereo rispetto all'aria.
ETAS (Effective True Air Speed): è il valore di velocità al quale deve essere sottratta la componente del vento in Prua o addizionata la componente di vento a favore per ottenere la velocità al suolo nei calcoli con il regolo calcolatore Jeppesen in presenza di angoli di scarroccio superiori a 10°.
Velocità al suolo (Ground Speed): è la velocità risultante dalla composizione vettoriale del vettore proprio del moto dell'aereo e del vettore vento, ovvero dalla somma della ETAS e della componente di vento in prua o in coda.
Numero di Mach: è il rapporto tra la velocità vera dell'aereo e la velocità del suono. Le velocità vengono considerate con riferimento al numero di MACH invece che soltanto con riferimento alla IAS da circa 27.000 piedi in su, in quanto a queste quote elevate i fenomeni di compressibilità assumono rilevanza primaria.
Tempo stimato di sorvolo (ETO) e di arrivo (ETA): l'Estimated Time Over è l'orario stimato di sorvolo dei vari punti di riporto previsti sul piano di volo. Viene determinato partendo dai dati conosciuti: distanza tra i punti, Rotte da mantenere, vento previsto e TAS o MACH number che verrà mantenuto in Rotta. Con il regolo calcolatore si determinano le Ground Speed tra i vari Waypoint, poi con queste si determina il Tempo necessario per percorrere le tratte considerate. Si procede in modo analogo per tutti i segmenti in cui viene diviso il volo, e infine partendo dall'orario del decollo, effettuando le somme dei tempi parziali si ottengono tutti gli stimati per i vari punti ed infine anche il Tempo stimato di arrivo.
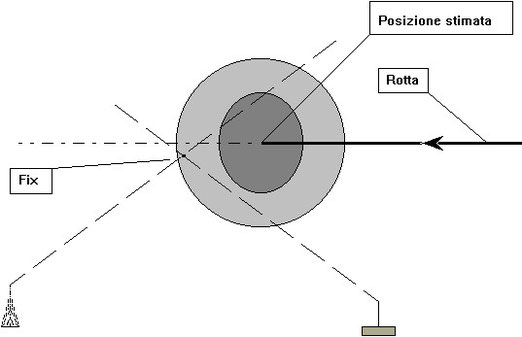
Posizione stimata: è un punto geografico che viene assunto quale posizione probabile dell'aereo, partendo dal calcolo degli elementi cinematici del moto, quando vi è l'impossibilità di determinare positivamente una posizione a vista o per mezzo di Radioaiuti. Ad una posizione stimata è sempre associato un cerchio di incertezza (Figura 11.1).

Fix: è la posizione dell'aereo determinata positivamente grazie al riconoscimento di particolarità sulla superficie terrestre o per mezzo di intersezione di luoghi di posizione (Figura 11.2).
11.2 Errori nella determinazione della Posizione stimata
Si parla di Posizione stimata quando la Posizione dell'aereo non è determinabile né attraverso alcun sistema di Navigazione né otticamente, e quindi questa non è positivamente identificabile. È il caso per esempio di un aereo che vola a bassa quota su superfici marine senza alcun sistema di Navigazione d'area. Una volta allontanatosi dalla costa non ricevendo più alcun segnale dalle stazioni terrestri, potrà continuare la Navigazione solamente stimando la sua Posizione, ma senza la possibilità di determinarla positivamente. L'aereo in esame partirà nella stima dall'ultimo punto sorvolato con precisione ad un orario determinato.
Conoscendo poi la Prua mantenuta, la Velocità al suolo ed il Tempo trascorso si potrà determinare la Posizione stimata.
La precisione, sarà funzione prima di tutto dell'accuratezza con cui si è determinata la Posizione del punto da cui parte la stima. Sarà poi dipendente dalla precisione con cui è conosciuto il Vento, e dalle correzioni apportate per tenere conto di questo; sarà anche dipendente dal Tempo trascorso dal momento in cui è stata determinata l'ultima Posizione e dalla precisione della condotta dell'aeromobile.
I parametri quale la Prua mantenuta, la Velocità, il Vento, non sono valori assoluti e immutabili ma variabili entro certi limiti dipendenti dalle attuali condizioni di volo.
Esempio:
Supponiamo di condurre l'aereo a mano senza l'uso dell'autopilota mantenendo una Prua desiderata di 090°. Effettuando una lettura della Prua ogni 10 secondi, nel corso di un'ora si otterranno 360 valori numerici che rappresentano le prue realmente mantenute durante il volo.
Possono essere applicati i metodi della statistica per determinare il valore medio di Prua effettivamente mantenuta.
Supponiamo di avere avuto queste letture:
|
Prue |
numero di letture |
|
070-074 |
10 |
|
075-079 |
20 |
|
080-084 |
30 |
|
085-089 |
60 |
|
090-094 |
100 |
|
095-099 |
80 |
|
100-104 |
40 |
|
105-109 |
20 |
Il valore medio è ottenuto facendo la somma di tutti i valori rilevati e dividendo poi per il loro numero. In questo caso il valore medio ricavabile è 092° e la deviazione standard è pari a 8°. Questo vuol dire che l'intervallo all'interno del quale troviamo i due terzi dei valori sperimentalmente ottenuti è di 16° circa a cavallo del valore medio.
Facendo una serie di prove di questo genere si potrebbe vedere che le prue medie effettivamente seguite sono in genere abbastanza vicine al valore desiderato, ma che comunque vi è sempre una certa distribuzione di valori intorno al valore desiderato.
L'ampiezza di questa distribuzione dipenderà dalla bravura del pilota, dalla stabilità dell'aereo, dalla presenza di turbolenza, sull'uso o meno dell'autopilota, ecc.

La conclusione a cui si vuole arrivare è la seguente: la Prua desiderata e la Prua media effettivamente seguita differiranno sempre di un valore non determinabile dal pilota in volo.
Considerazioni analoghe possono essere fatte per tutti gli altri parametri di volo, come ad esempio la Velocità. Avendo l'automanetta inserita, è logico aspettarsi di avere una TAS media molto vicina a quella selezionata; senza automanetta, e specialmente in condizioni di aria turbolenta, è ragionevole aspettarsi un valore medio di TAS più lontano da quello desiderato.
È possibile comunque fare una stima dell'ordine di grandezza degli errori probabili in funzione della situazione reale, al fine di vedere come questi si ripercuotono poi sulla determinazione della Posizione, che è il risultato finale.
Avremo quindi in generale una Prua media e una Velocità media diverse da quelle desiderate, e già questo sarebbe sufficiente a creare una certa incertezza nella determinazione della Posizione stimata crescente con il Tempo; c'è però anche il Vento, che non è mai conosciuto con esattezza, e che introduce un'altra fonte di errori molto notevoli.
Gli errori derivanti dalla imprecisione nella condotta dell'aereo e quelli derivanti dalla imprecisa conoscenza del Vento si sommano e hanno come conseguenza quella di ampliare la zona di incertezza dentro la quale si trova l'aereo.
La Posizione all'interno dell'area d'incertezza può essere valutata solamente in termini di probabilità: ad esempio dopo una attenta valutazione dell'ordine di grandezza degli errori probabili è possibile stabilire un raggio di incertezza associato ad un preciso valore della probabilità che l'aereo si trovi all'interno di questo.
Si può in definitiva giungere alla determinazione della probabilità che l'aereo si trovi entro un raggio di R1 dal punto stimato con una probabilità X1% e della probabilità che si trovi entro un raggio R2 (R2 >R1) dal punto stimato con una probabilità X2% (X2>X1).
Un alto valore di probabilità associato ad un valore piccolo del raggio sta ad indicare che gli errori sono stati valutati di piccola entità. Al contrario, in presenza di presumibili errori di notevole entità, si ottengono grandi valori del raggio di incertezza associati a piccoli valori di probabilità. In ogni caso fino a quando non si ha la possibilità di accertare positivamente una Posizione, si rimane sempre e comunque nell'ambito delle probabilità e quindi in una certa misura anche del caso.
Esempio.
Un aereo da turismo decolla da Alghero diretto a Barcellona, mantenendo una quota di 1.000 piedi ed una Velocità di 120 nodi procedendo su una rotta magnetica di 281° e dovendo percorrere una distanza pari a 283 miglia.
Trenta minuti dopo il decollo non riceve più il segnale del VOR DME di Alghero. L'ultima lettura lo indicava sul Radiale 281° a 60 DME.
Il pilota sa che l'imprecisione propria del VOR può essere valutata in 3° a cui va aggiunto 1° per la lettura dello strumento.
L'imprecisione del DME può essere valutata in 0,5 miglia o 3% del valore fornito, quale dei due valori è maggiore
.
L'Errore probabile laterale è quindi di 4 miglia; per quanto riguarda la distanza il 3% di 60 miglia corrisponde a circa 2 miglia. Il cerchio di incertezza a questo punto non è un vero e proprio cerchio, ma più propriamente un rettangolo con i lati di 8 e 4 miglia, posto a cavallo della Posizione fornita dagli strumenti (Figura 11.4).

Il pilota continua in Rotta confidando nella calma di Vento che gli era stata pronosticata dall'Ufficio meteo prima della partenza e che aveva verificato nella prima mezz'ora di volo, e quindi mantiene Prua 281° senza correzioni.
Dopo un po', osservando le onde si rende conto che il Vento non può essere calmo, e che deve essere almeno di 20 nodi, anche se non riesce a stabilirne la provenienza. Continua quindi nella Navigazione mantenendo gli stessi parametri di volo e aggiornando solamente il cerchio di incertezza nella Posizione.
Un ora dopo il decollo traccia sulla Carta la Posizione stimata; per quanto riguarda l'incertezza nella Posizione egli fa le seguenti considerazioni: gli errori di pilotaggio, vengono valutati in 5° per quello che riguarda la Rotta, e in 5 nodi per la Velocità; questo corrisponde a 10 miglia all'ora per la Rotta e 5 miglia all'ora per la distanza percorsa. A questi errori va aggiunto l'Errore valutato sul Vento di 20 miglia all'ora in tutte le direzioni.
Dopo un'ora dal decollo, e 30 minuti dalla perdita del segnale VOR egli valuta gli errori possibili di questa grandezza:
Errore di Rotta = errore precedente + errore di rotta + errore per il vento = 4+5+10 = 19 miglia
Errore di distanza = errore precedente + errore di velocità + errore del vento = 2+2,5+10 = 14,5
Dopo un'altra ora di volo, ancora senza Terra in vista, egli traccia sulla Carta la sua Posizione stimata, che lo vede a circa venti minuti di volo da Barcellona.
Egli fa anche una revisione delle dimensioni del cerchio di incertezza, essendo tutti i parametri di volo invariati ed il Vento di direzione indeterminata ancora presente.
Errore di Rotta = errore precedente + errore di rotta + errore per il vento = 19+10+20 = 49
Errore di distanza = errore precedente + errore di velocità + errore del vento = 14,5+5+20 = 39,5 40
Dalle misure degli errori si vede che il cerchio di incertezza non è proprio un cerchio, ma in questo caso assomiglia di più ad un ellisse.
Dopo venti minuti, quando l'aereo doveva essere sulla verticale di Barcellona, e non vedendo ancora Terra, egli fa un'ultima valutazione del punto stimato e dell'Errore possibile.
Il punto stimato coincide con l'aeroporto di Barcellona, ma questo è sicuramente sbagliato in quanto il nostro pilota non vede ancora Terra. Per quanto riguarda il cerchio di incertezza invece egli calcola:
Errore di Rotta: 49 +3 + 7 = 59
Errore di distanza = 40 + 2 + 7 = 49
Il cerchio di incertezza è a questo punto veramente grande (Figura 11.5).

Egli comunque continua in Rotta, confidando sul fatto che il Mediterraneo è praticamente un mare chiuso, e che quindi prima o poi incontrerà una costa. Infatti dopo altri 20 interminabili minuti di volo, egli avvista una grande foce di un fiume, che identifica come le foce dell'Ebro. Grazie a questo Fix ottico, egli capisce di trovarsi all'estremo Sud del cerchio di incertezza; quindi il Vento incontrato era probabilmente il classico Vento da Nord-Ovest del Golfo del Leone, che, anche se non previsto, era presente e lo aveva portato fuori Rotta.
A questo punto, egli prosegue lungo costa direttamente verso Barcellona.
Questo esempio un po' romanzato ha lo scopo di far rendere conto delle dimensioni del cerchio di incertezza, e di come queste tendano a diventare incredibilmente grandi anche in presenza di un Vento diverso da quello previsto di soli 20 nodi, e con errori sul mantenimento della Rotta e della Velocità abbastanza contenuti.
In presenza di errori di questo genere è possibile riuscire a non avvistare un'isola delle dimensioni di Maiorca dopo un paio di ore di Navigazione stimata.
Questo spiega la necessità di provvedere periodicamente al rifasamento della Posizione per mezzo di un Fix.
L'unica maniera per verificare l'esattezza delle assunzioni che sono state fatte durante una Navigazione stimata è quella di fare un Punto (Fix) appena possibile.
Nel caso in cui il Fix risulti vicino al Punto stimato significa che gli errori sono stati piccoli.
Se coerentemente il raggio del cerchio di incertezza era stato valutato di piccole dimensioni, questo vuol dire che anche la grandezza probabile degli errori era stata valutata correttamente.
Nel caso in cui invece il cerchio di incertezza era stato valutato di notevoli dimensioni, questo può voler dire che gli errori erano stati sopravalutati o che semplicemente siamo stati fortunati, e che gli errori benché grandi si sono sottratti invece che sommarsi.
Nel caso in cui il Fix cade al di fuori del cerchio di incertezza occorre effettuare un'attenta valutazione dei dati disponibili: potrebbe essere il caso per esempio di un Errore superiore a quello prevedibile per quanto riguarda il Vento, una condotta dell'aereo particolarmente imprecisa, uno strumento malfunzionante.
Nel caso in cui il Punto effettuato alla fine di una Navigazione stimata risulta molto distante dal Punto stimato, occorre fare una valutazione molto critica dell'attendibilità del Punto effettuato, onde verificare che non sia stato commesso uno sbaglio (Errore grossolano) o nella stima, o nel Fix: è necessario capire quale è il parametro che è stato considerato incorrettamente, al fine di poter proseguire nella Navigazione in maniera più accurata.
Come è già stato detto in precedenza, il cerchio di incertezza non è necessariamente un cerchio, ma può assumere una forma che va dal trapezio, all'ellisse, in dipendenza della precisione con cui sono conosciuti i parametri che vanno a influenzare la precisione nel senso della Rotta e nel senso della distanza.
Quando si parla di errori, però non è possibile andare troppo per il sottile, ma occorre limitarsi all'ordine di grandezza, anche perché se fosse possibile determinare gli errori con esattezza, allora sarebbe altrettanto facile eliminarli.
Nell'impossibilità di determinare una Posizione esatta senza effettuare un Fix, parleremo di cerchio di incertezza, intendendo con questo di associare ad ogni raggio del cerchio di incertezza una data probabilità che l'aereo si trovi al suo interno.
Per chiarire il discorso immaginiamo di lanciare freccette contro un bersaglio attaccato al muro. Supponiamo che il centro del bersaglio rappresenti la nostra Posizione stimata, e che la freccetta sia l'aereo. A seguito di una serie di lanci, potremmo per esempio notare che il 30% delle freccette è caduto entro 10 centimetri dal centro, che il 60% è caduta entro 30 centimetri, che il 90% è compreso in un raggio di un metro dal centro, con qualche lancio che quindi ha colpito il muro.
Dovendo ora fare un ulteriore lancio, chiaramente non si ha modo di sapere dove la freccetta cadrà. Se questo si potesse sapere, avremmo trovato la maniera per vincere a tutti i giochi di azzardo indovinando il futuro.
L'unica cosa che possiamo dire è che la probabilità che la freccetta cada molto vicino al centro è abbastanza bassa, mentre la probabilità che la freccetta colpisca un qualunque punto del bersaglio o del muro di fronte a noi è estremamente alta, ma questo non è di molta utilità pratica.
Nel caso di un aereo in volo in mezzo al mare, sul deserto o sopra un mare di nubi senza la possibilità di poter stabilire la Posizione in altra maniera, ci troviamo nelle condizioni del tutto simili a quelle del lanciatore di freccette che deve scommettere sul punto in cui cadrà la freccetta del prossimo lancio.
Nel caso dell'esempio precedente è facile dire che la Posizione dell'aereo è da qualche parte nel mare Mediterraneo, con una probabilità del 100%. Questo non ci è di alcuna utilità.
Analogamente, dire che le probabilità che l'aereo si trovi entro un raggio di 100 metri dalla Posizione stimata è dello 0,1% non è di alcuna utilità pratica, perché questo dato ci dice solamente che la probabilità che l'aereo sia da qualche altra parte, senza dirci dove, è del 99,9%.
Dobbiamo quindi avere un qualche criterio empirico che possa associare un valore sufficientemente alto della probabilità di presenza dell'aereo all'interno del raggio di incertezza al raggio stesso.
A titolo puramente indicativo, con l'avvertenza che questi valori possono variare anche di molto in funzione del tipo di aereo, delle Velocità in gioco, della condotta manuale o con l'autopilota dell'aereo, della presenza di turbolenza ecc., si riportano valori indicativi del raggio di incertezza dopo un'ora di volo per i valori di probabilità di presenza all'interno del cerchio del 50% e del 90%.
Chiaramente il raggio di incertezza associato ad una probabilità del 90% è molto più grande (Figura 11.6).

Empiricamente si è stabilito che dopo un'ora di Navigazione da una Posizione confermata, un aereo ha il 90% delle probabilità di trovarsi entro un cerchio avente centro nella Posizione stimata e raggio pari a 20 miglia più l'1% della distanza percorsa, ed ha il 50% delle probabilità di trovarsi entro un cerchio di raggio pari ad un terzo dei precedente, mai comunque inferiore a 8 miglia.
Talvolta capita di dover eseguire una stima che riguarda solo un parametro, quale per esempio la distanza percorsa. È questo il caso di un aereo che vola tra una Radioassistenza ed un'altra senza la disponibilità di un DME.
La Posizione è determinata con esattezza soltanto in occasione del sorvolo delle stazioni; la Posizione istantanea può essere soltanto stimata per quanto riguarda la distanza dalla Radioassistenza, mediante la conoscenza della Velocità al suolo e del Tempo trascorso.
A volte vi è la necessità di procedere a stime di questo tipo con la massima precisione possibile.
Facciamo il caso di un aereo che effettua una procedura di non precisione senza l'ausilio del DME.
Dopo il sorvolo della stazione (Final Approach Fix), che rappresenta l'ultimo Punto verificato con esattezza grazie al sorvolo della stazione VOR o NDB, il pilota procede in direzione della pista ancora con l'ausilio delle indicazioni radioelettriche che continua a ricevere, avendo quindi a disposizione un luogo di Posizione che gli permette la guida nel piano orizzontale.
Per quanto riguarda la Navigazione nel piano verticale e il computo del Tempo necessario per il sorvolo della soglia pista, tempo dopo il quale deve essere iniziata la manovra di mancato avvicinamento, ci si deve affidare alla stima che viene effettuata dal pilota, eventualmente anche con l'ausilio del regolo calcolatore.
Le considerazioni che devono essere fatte sono le seguenti:
- per prima cosa occorre conoscere il Vento al suolo, che generalmente può essere considerato valido per tutta la fase finale dell'avvicinamento, a meno che non si riesca ad ottenere un dato più preciso in qualche altra maniera (ad esempio una lettura del Vento fornita da un aereo che precede dotato di piattaforma inerziale)
- in funzione del Vento e della eventuale presenza di raffiche deve essere decisa la Velocità che verrà mantenuta nell'ultima parte dell'avvicinamento
- da questa Velocità indicata occorre poi ricavare la TAS
- si determina infine la Velocità al suolo prevista (GS)
- data la distanza che deve essere percorsa tra il FAF e la soglia pista e la GS, si determina il Tempo necessario
Se i calcoli sono stati fatti bene, le condizioni sono effettivamente quelle attese, e la Navigazione è stata condotta correttamente, mantenendo le Velocità previste e i ratei di discesa corretti, allo scadere del Tempo l'aereo si dovrebbe trovare a sorvolare la soglia pista alla quota di flare (50 piedi).
Rimane sottinteso che la manovra di atterraggio deve essere conclusa al di sotto della minimum descent altitude con riferimento visivo al suolo, e che, una volta raggiunta la MDA (minimum descent altitude), o una volta scaduto il Tempo calcolato per il sorvolo della soglia pista, se non sono stati acquisiti adeguati riferimenti visivi, deve essere iniziata una manovra di mancato avvicinamento.
Esempio:
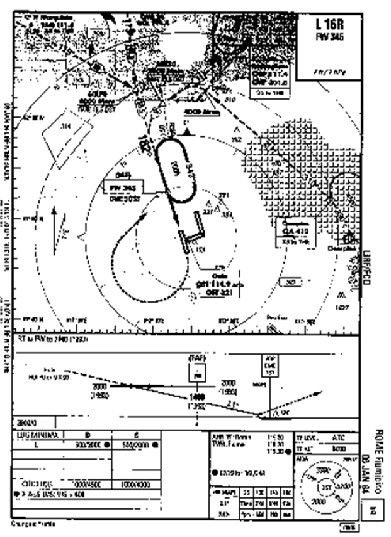
Si deve eseguire per addestramento un avvicinamento L 16R a Roma Fiumicino. La TAS per la configurazione finale è di 130 Kts. Il Vento riportato è 220°-20 Kts. Preparare la tabellina per l'avvicinamento.
Con il regolo si calcola la GS che risulta essere di 120 nodi a causa di una componente frontale di 10 nodi.
La componente laterale da destra è di 17 nodi. Dal regolo si ricava un Crab angle di circa 7° a destra; la Prua iniziale dopo il sorvolo del locator dovrà quindi essere di 169°, salvo poi essere corretta una volta usciti dal cono di confusione, con le indicazioni stabilizzate dell'ago, al fine di mantenersi sul QDR 162°.
Dalla Carta si rileva che la quota di sorvolo dell'OM è 1386 ft QFE, la distanza dell'OM dalla soglia pista è di 4 miglia (Figura 11.7).
Dalla tabellina in fondo alla Carta di avvicinamento o dal regolo si ricava che il Tempo per la soglia pista è di 2'00", e che il variometro da mantenere è di 650 ft/min
La tabellina richiesta sarà quindi la seguente:
|
Out. Marker (FW/L) |
1400 ft |
|
30" |
1100 ft |
|
1' |
650 ft |
|
MINIMA |
550 ft |
|
1' 30" |
350 ft |
|
FAF-THR |
2'00" |
11.3 Carteggio in volo mediante luoghi di posizione
Il Carteggio in volo mediante luoghi di posizione è ormai un lontano ricordo, in quanto i moderni metodi della Radionavigazione, della Navigazione inerziale ed il sistema GPS hanno fatto sì che l'effettivo tracciamento delle linee di posizione, il loro trasporto e lo studio delle correzioni da apportare abbiano ormai valore unicamente scolastico e importanza marginale anche per quanto riguarda la fase di pianificazione del volo, grazie all'avvento di sistemi computerizzati che in brevissimo tempo consentono di ottimizzare i piani di volo a seconda delle esigenze.
E' comunque importante essere in grado di tracciare una rotta su una carta, leggerne il valore in gradi, e saper determinare una distanza tra due punti.
Fatta eccezione per la Carta Gnomonica (peraltro usata in pianificazione per voli di lungo raggio e solo in occasioni particolari), tutte le carte correntemente usate in campo aeronautico sono isogone. Ciò comporta che gli angoli misurati sulla carta siano uguali a quelli corrispondenti sulla superficie della Terra. La determinazione di una rotta vera consiste quindi nella misurazione dell'angolo che la linea rappresentativa della rotta forma con i meridiani tracciati sulla carta.
Questa operazione viene realizzata semplicemente mediante l'uso di un goniometro o di un righello con annessa scala goniometrica.
Ai valori di rotta vera così ricavati possono successivamente essere applicate tutte le correzioni necessarie per ricavare la rotta magnetica e la rotta bussola.
Per quanto riguarda la determinazione della distanza, questa viene generalmente determinata mediante il confronto del segmento da misurare con la scala delle Latitudini. Occorre ricordare che vanno osservate alcune cautele a seconda della proiezione geografica usata: per esempio nella proiezione di Mercatore, come già esaminato in precedenza, la scala della Carta non è costante, e cresce con la Latitudine.
11.4 Luoghi di Posizione
I luoghi di Posizione di maggior interesse per gli scopi della Navigazione aerea sono i seguenti:
-
Luogo di Posizione di uguale azimut.
-
Luogo di Posizione di uguale differenza di azimut.
-
Luogo di Posizione di uguale distanza.
-
Luogo di Posizione di uguale altitudine.
-
Luogo di Posizione di uguale differenza di fase o di Tempo tra due segnali radio.
-
Cerchio d'altezza.
11.5 Luogo di Posizione di uguale azimut
Il Luogo di Posizione di uguale azimut, è una linea lungo la quale si rileva un oggetto determinato con azimut costante (Figura 11.8).

La linea isoazimutale è quindi il Luogo geometrico dei punti della superficie terrestre dai quali, una stazione o un punto identificabile, viene rilevato sempre sotto lo stesso angolo.
Normalmente, per brevi distanze, la linea può essere confusa senza errore apprezzabile con una linea retta.
In realtà, volendo essere rigorosi, come già visto precedentemente questa linea corrisponde ad un arco di cerchio passante per il polo, per l'aereo e per il punto stesso.
Quando l'azimut di un oggetto viene misurato allo scopo di stabilire un Luogo di Posizione, questo prende il nome di Rilevamento.
I Rilevamenti, vengono misurati a partire dalla direzione del Nord in senso orario da 0° a 360°. Come sempre il Nord di riferimento può essere il Nord vero o magnetico. Si parlerà concordemente di Rilevamento vero o magnetico.
Nel caso in cui la direzione di riferimento sia l'asse longitudinale dell'aereo, parleremo di Rilevamento polare, anch’esso misurato in senso orario da 0° a 360° a partire dalla Prua.
I Rilevamenti possono anche venire misurati da 0° a 180° a destra e a sinistra dell’asse longitudinale dell’aereo (Figura 11.9).

Il Rilevamento polare, nelle comunicazioni radio, per quanto riguarda le informazioni di traffico essenziale, viene misurato come le ore dell'orologio.
Se viene segnalato un aereo a ore 12, dovremo ricercarlo di fronte a noi, se viene segnalato ad ore 3, questo sarà alla nostra destra, se è segnalato ad ore 8, questo sarà leggermente dietro al nostro traverso sinistro.
Un comune strumento di bordo che misura Rilevamenti polari è l'ADF: l'antenna dell'ADF può ruotare, ed è in grado di orientarsi in direzione della stazione NDB di Terra. L'ago dello strumento che è visibile in cockpit, riproduce l'angolo che forma l'antenna rispetto all'asse longitudinale dell'aereo (Figura 11.10).
Se sotto la lancetta viene messo un quadrante orientato per il Nord magnetico si è anche in grado di leggere immediatamente il Rilevamento magnetico.
Se il quadrante è orientato per il Nord vero, si leggeranno Rilevamenti veri.

11.6 Luogo di Posizione di uguale differenza di azimut
Si ha dalla geometria che: dato un cerchio, gli angoli alla circonferenza che insistono sullo stesso arco sono uguali.
Questo Luogo di Posizione ha applicazioni limitate, e in particolare ha applicazioni in Navigazione nautica per determinazioni di Posizione di precisione (11.11).

11.7 Luogo di Posizione di uguale distanza
La misura della distanza da un oggetto di coordinate note consente di individuare un particolare Luogo di Posizione: questo consiste in una superficie sferica formata dall'insieme di tutti i punti dello spazio la cui distanza dall'oggetto è uguale a quella misurata (Figura 11.12).
Tra i Radioaiuti che determinano luoghi di Posizione di questo tipo ricordiamo innanzitutto il DME, già esaminato in precedenza per quanto riguarda le problematiche riguardanti la determinazione della Ground Speed. Abbiamo inoltre il GPS, che permette la determinazione di una Posizione tridimensionale (Latitudine, Longitudine e Quota), ricavabile dall'intersezione di tre luoghi di Posizione sferici, che rappresentano la distanza tra il satellite e l'osservatore.

11.8 Luogo di Posizione di uguale altitudine
Le Isoipse sono linee che congiungono i punti aventi uguale altitudine sul livello di riferimento, che è generalmente il livello medio del mare. Sulle Carte, i rilievi orografici vengono identificati e tracciati mediante curve di livello, come già esaminato precedentemente.
Ogni Isoipsa corrisponde ad una determinata altezza: esaminando l'andamento e la spaziatura delle Isoipse è possibile avere un'idea abbastanza precisa sia dell'elevazione del rilievo che della pendenza.

11.9 Luogo di uguale differenza di fase o differenza di Tempo tra due segnali radio
Vi sono alcuni sistemi di Navigazione che si basano su particolari luoghi di Posizione iperbolici.
Immaginiamo di avere due stazioni che emettono contemporaneamente e ad intervalli regolari di Tempo, degli impulsi radio. Le onde elettromagnetiche, viaggiando alla Velocità della luce, impiegano un certo Tempo a raggiungere la stazione ricevente. Il Tempo impiegato sarà direttamente proporzionale alla distanza.
Supponiamo di avere la stazione ricevente ad uguale distanza tra le due stazioni trasmittenti. In questo caso i due impulsi verranno ricevuti contemporaneamente.
È agevole quindi determinare un primo Luogo di Posizione, e precisamente quello nel quale i due impulsi vengono ricevuti contemporaneamente: questo è una linea retta perpendicolare alla congiungente tra le due stazioni e passante per il punto che si trova a metà della congiungente tra le due stazioni (Figura 11.14).

Si può anche dire che quello identificato è il Luogo di Posizione in cui la differenza di Tempo nella ricezione dei due segnali è 0, ovvero equidistante dalle due stazioni.
È possibile identificare anche luoghi di Posizione nei quali la differenza di Tempo tra la ricezione dei due segnali ha un valore definito e costante.
Si tratta di iperboli sferiche, lungo le quali la differenza di Tempo in microsecondi tra la ricezione del primo e del secondo segnale è costante.
Considerazioni analoghe possono essere fatte per sistemi che usano differenza di fase anziché differenza di Tempo per la determinazione dei luoghi di Posizione iperbolici. Le iperboli sono tracciate su apposite Carte, e numerate in funzione del loro valore in microsecondi. Dall'intersezione di due luoghi di Posizione è possibile ricavare un Fix.
11.10 Cerchio d'altezza
Il Luogo di Posizione di uguale altezza è quella linea sulla superficie terrestre lungo la quale un astro viene osservato con la stessa altezza rispetto all'orizzonte astronomico. La linea in esame corrisponde ad un cerchio minore avente centro in corrispondenza dell'intersezione della superficie terrestre con la linea congiungente l'astro con il centro della Terra. Questa linea è di interesse nella Navigazione astronomica; attualmente questo tipo di luoghi di Posizione non trova più applicazione nella Navigazione aerea (Figura 11.15).

11.11 Trasporto dei luoghi di Posizione
Abbiamo già visto in precedenza che la Posizione di un aereo è determinabile grazie all'intersezione di due luoghi di Posizione. Presupposto essenziale è che questi siano contemporanei.
Infatti, se questi sono riferiti ad orari diversi, tutto quello che possiamo dire è che al Tempo T1 l'aereo si trovava sul primo Luogo di Posizione, e che al Tempo T2 si trovava sul secondo. Non ci è permesso comunque di metterli in relazione in quanto non omogenei.
Si riesce a eludere questo problema per mezzo del trasporto, simulando quindi una contemporaneità che in realtà non esiste. Il trasporto viene effettuato in pratica traslando il Luogo di Posizione di una quantità pari allo spostamento stimato dell'aereo nel Tempo intercorso tra la determinazione dei due luoghi di Posizione (Figura 11.16).

Esempio.
Un aereo vola con Prua 090° e GS pari a 120 nodi; alle ore 12:00 effettua una lettura del DME della Radioassistenza 'A" pari a 40 miglia.
Alle 12:10 rileva il NDB 'B" per 210°.
Data la GS; l'aereo in 10 minuti percorrerà 20 miglia, e supponendo di volare in assenza di Vento il suo spostamento sarà in direzione 090°. Si provvederà quindi a tracciare un Punto sulla Carta che si trova per 090° a 20 miglia dalla Radioassistenza "A", e da questo punto si traccerà il Luogo di Posizione che è rappresentato da un cerchio del raggio di 40 miglia. Dal Punto "B" si traccia quindi una retta pari a 210° + 180°, e dall'intersezione dei due luoghi di Posizione è immediato ricavare la Posizione (Figura 11.17).

Il trasporto viene effettuato con i dati stimati del moto dell'aereo, quindi è soggetto a tutti gli errori della Navigazione stimata. Di conseguenza, al fine di minimizzare gli errori, è bene che il Tempo intercorso tra le due determinazioni dei luoghi di Posizione sia il più breve possibile.
Il metodo è applicabile anche a due Luoghi di Posizione ricavati da una stessa Radioassistenza: per esempio da due Rilevamenti di uno stesso NDB presi in tempi successivi è possibile determinare un Fix, mediante di trasporto del primo Rilevamento al Tempo del secondo (Figura 11.18).

11.12 Utilizzo di un singolo Luogo di Posizione
Un singolo Luogo di Posizione non è sufficiente a permettere la determinazione di un Fix, ma può comunque essere convenientemente utilizzato per ridurre le dimensioni del cerchio di incertezza, o per determinare almeno con una certa approssimazione una coordinata.
Ad esempio, mediante l'osservazione dell'altezza del sole al passaggio al meridiano o della stella polare si può risalire alla Latitudine dell'osservatore; in Rotta, passando al traverso di una stazione VOR o NDB, anche se a distanza non conosciuta con precisione, si può effettuare un controllo della Velocità al suolo (GS) (Figura 11.19).
E’ quindi importante utilizzare tutte le indicazioni che di volta in volta sono disponibili, al fine di mantenere le dimensioni del Cerchio di incertezza di dimensioni quanto più piccole possibili.

11.13 Uso dei punti di sorvolo per la revisione dei dati di Navigazione
L'effettuazione di qualsiasi volo che non sia un volo campo, prevede una prima fase di pianificazione e preparazione della Navigazione più o meno complessa in funzione della durata del volo, della distanza da percorrere, delle condizioni meteorologiche in Rotta e a destinazione, delle restrizioni di traffico, dei NOTAM, e di una serie di altri parametri che devono comunque essere tenuti in considerazione in un'ottica globale della condotta dell'aereo. Per gli scopi del corso prenderemo in considerazione solamente gli aspetti più strettamente legati alla condotta della Navigazione, tralasciando quindi qualsiasi tipo di considerazione legata a problematiche ATC, commerciali ecc.
La fase di preparazione si conclude con la stesura del Piano di Volo, che è uno stampato su cui vengono riportati tutti i punti di sorvolo, le Rotte e le distanze tra i punti, i tempi necessari per volare da un punto all'altro, il carburante residuo minimo su ogni Punto e numerosi altri dati di secondaria importanza.
La compilazione del piano di volo presuppone la conoscenza delle prestazioni dell'aereo, delle Velocità che verranno mantenute durante la Salita, la Crociera e la Discesa, del Vento lungo la Rotta, del consumo orario di carburante, ecc.
L'effettuazione del volo consiste poi nell'effettivo sorvolo dei vari punti pianificati e nella verifica dell'eventuale esattezza dei parametri considerati in sede di pianificazione.
In generale il fattore di più difficile conoscenza con sufficiente precisione è il Vento. Nonostante i progressi fatti dai servizi meteorologici, non è inusuale incontrare un Vento diverso in direzione di alcune decine di gradi e in intensità di parecchie decine di nodi rispetto a quello previsto sulle Carte meteorologiche, soprattutto volando sopra zone disabitate o poco progredite, come ad esempio l'Africa, l'Atlantico Meridionale, l'Estremo Oriente.
È perciò necessario, durante il volo, effettuare tutte le manovre necessarie al fine di mantenersi sulla Rotta desiderata, o rientrare in Rotta qualora ci si trovi spostati; è inoltre indispensabile considerare l'influenza sui tempi e sui consumi di un Vento diverso da quello pianificato.
Inoltre nel caso in cui vi siano dei tempi da rispettare per il sorvolo di particolari punti, per esempio per problemi di controllo del flusso di traffico, occorrerà variare convenientemente la Velocità.
Nel caso più frequente in cui la Velocità è mantenuta costante e il Vento è diverso da quello pianificato occorrerà rivedere i tempi di sorvolo. In ogni caso occorre sempre valutare con attenzione l'andamento dei consumi.
I punti di sorvolo, se convenientemente scelti, consentono una periodica verifica di tutti i parametri della Navigazione, e in particolare i più importanti, che sono i tempi e i consumi.
La condotta della Navigazione può essere effettuata essenzialmente con le seguenti modalità:
-
Navigazione a vista
-
Radionavigazione
-
Navigazione stimata
Nel caso della Navigazione a vista, la Posizione dell'aereo è sempre conosciuta con precisione, in quanto ci si riferisce costantemente a rilievi caratteristici del terreno, strade, fiumi, linee di costa, laghi, città, fabbriche, ecc.
Durante la pianificazione del volo, a terra, si decide la Rotta che deve essere seguita, e quindi si selezionano i punti caratteristici che devono essere sorvolati. Si calcola poi la Rotta e la distanza tra i punti, ricavando questi dati dalla Carta, e infine, conoscendo la quota che verrà mantenuta, la TAS e il Vento previsto si calcola il Tempo per percorrere ogni tratto della Rotta, e le varie prue che dovranno essere mantenute.
Durante l'effettuazione del volo, occorrerà, tratta per tratta, verificare che i calcoli effettuati in pianificazione siano corretti.
Nel caso della Navigazione a vista, il pilota è in grado di verificare facilmente se le prue calcolate a Terra erano esatte, e comunque le può correggere come necessario al fine di sorvolare i punti previsti, in quanto egli ha la possibilità di verificare costantemente la propria Posizione sul terreno.
La precisione richiesta può essere anche in questo caso di diverso valore: per esempio nel caso di una semplice Navigazione di trasferimento sarà sufficiente limitarsi al controllo della Posizione in occasione di grossi centri abitati, o di rilievi naturali prominenti; nel caso invece di una Navigazione tattica o di precisione, quale è quella che si deve effettuare per arrivare a sorvolare un particolare campo in mezzo ad una pianura, o una particolare baita in mezzo alle montagne, occorrerà innanzitutto essere forniti di Carte sufficientemente dettagliate e a grande scala, e condurre poi la Navigazione verificando quasi costantemente il progredire del volo.
In quest'ultimo caso il riferimento a prue e distanze perde gran parte della sua importanza, infatti il volo deve essere impostato in questo modo: sorvolando un Punto caratteristico, ad esempio un incrocio di strade, il pilota legge sulle Carta o sul piano di volo la Prua da impostare per il successivo Punto di sorvolo, ed il Tempo necessario per raggiungerlo.
Dopo aver impostato la Prua precalcolata, ed aver fatto partire il cronometro, egli deve senz'altro procedere all'identificazione ottica del Punto successivo, e appena lo ha positivamente individuato, procedere decisamente in direzione di questo. Il riferimento alle prue e ai tempi precalcolati, eventualmente rivisti in volo mettendo a calcolo il Vento effettivamente rilevato, hanno principalmente lo scopo di permettere al pilota una valutazione attendibile del Tempo oltre al quale proseguire nella Rotta è inutile, avendo mancato il riconoscimento di un Punto caratteristico.
Nel caso in cui non si sia riusciti a riconoscere un Punto caratteristico, infatti occorre decidere se proseguire in Rotta, con le tecniche della Navigazione stimata, e con la certezza di partire nella stima con un Errore tale da non consentire il riconoscimento a vista dell'ultimo Punto, o piuttosto ritornare indietro all'ultimo Punto di sicura identificazione, per ripetere, con più attenzione l'ultima tratta.
È senz'altro più conveniente proseguire in Rotta se si ritiene che il Punto che si era prescelto sulla Carta, risulta poi, nel contesto orografico reale, di difficile identificazione, mentre il prossimo sarà chiaramente identificabile con facilità anche da una certa distanza.
Nel caso invece in cui si vada incontro ad una serie di punti di difficile identificazione, è sconsigliabile partire da una Posizione non certa.
Nel caso particolare in cui si stia effettuando un percorso con tempi obbligati di sorvolo, le cose ci complicano un pò, in quanto è necessario tener conto dell'influenza del Vento reale sulle GS e quindi modificare convenientemente la TAS al fine di rispettare i tempi previsti.
I punti di sorvolo durante una Navigazione a vista sono normalmente utilizzati al fine di ottenere una migliore stima del Vento che si sta incontrando in volo.
Grazie alla conoscenza di un suo valore abbastanza reale, è infatti possibile aggiornare i tempi stimati di sorvolo, mettendo a calcolo la sua componente a favore o contraria lungo la rotta.
Per quanto riguarda la prua da impostare inizialmente dopo il sorvolo di ciascun punto, questa è quella precalcolata, eventualmente rivista in funzione del Vento effettivo.
La prua che comunque deve essere effettivamente mantenuta, è quella che risulta dal confronto delle fattezze del terreno con quanto riportato sulla carta.
Vi è un continuo processo di aggiornamento dei dati, in quanto partendo da un valore stimato di vento, a terra, in fase di pianificazione si precalcola una prua e un tempo necessario per percorrere ciascuna tratta; in volo, avendo a disposizione i valori di prua e di tempo effettivamente necessari per percorrere ogni segmento considerato, si aggiorna il dato di vento, o meglio si riconsiderano principalmente i dati di immediato utilizzo, che sono l’angolo di deriva e la velocità al suolo effettiva. Questi valori sono quelli che verranno utilizzati per la tratta successiva, e sono comunque anch’essi soggetti a continua revisione, in modo da avere dati sempre aggiornati durante tutta l’effettuazione del volo.
Per quanto riguarda la Radionavigazione, ed in particolare la Navigazione in aerovia, abbiamo in questo caso che la Posizione è costantemente conosciuta con buona precisione, soprattutto se si dispone del DME. Invece nel caso in cui si voli facendo riferimento soltanto a VOR o NDB, la Posizione può essere determinata con precisione soltanto in occasione del sorvolo delle Radioassistenze o all'incrocio di Radiali conosciuti.
La Ground Speed è ricavata conoscendo la distanza percorsa tra il sorvolo di due stazioni ed il Tempo impiegato; dal confronto con la TAS si ricava la componente di Vento a favore o contrario.
Conoscendo anche il Crab angle necessario per restare in Rotta, è facile ricavare il Vento per mezzo del regolo Jeppesen.
Molto spesso non è necessario arrivare alla determinazione del vettore Vento, ma è sufficiente determinare la componente lungo la Rotta, al fine di poter aggiornare i tempi stimati di sorvolo.
Per quanto riguarda la Navigazione stimata, abbiamo già visto in precedenza che anche piccoli errori di pilotaggio e nella conoscenza del Vento, possono produrre aree di incertezza molto grandi in breve tempo. Perciò nella Navigazione stimata, più che in ogni altro caso, l'aggiornamento della Posizione, e una precisa valutazione del Vento effettivo, è della massima importanza, al fine di poter proseguire con la massima precisione ottenibile.
Nell'esempio delle pagine precedenti, in cui volendo effettuare un volo da Alghero a Barcellona ci si è invece ritrovati alle foci dell'Ebro, a circa 70 miglia a Sud-Ovest di Barcellona, sarebbe stato più conveniente pianificare il volo come Alghero - Minorca - Barcellona, spezzandolo quindi in due tratte, con la possibilità di rifasare la Posizione un po' dopo metà percorso. Questa determinazione intermedia di Posizione, e conseguente possibilità di calcolo del Vento effettivo in volo, avrebbe permesso di dirigere verso l'aeroporto di destinazione con una precisione enormemente superiore rispetto a quella effettivamente ottenuta, ed il tutto a prezzo di un piccolo allungamento della distanza, comunque inferiore rispetto a quella percorsa con l'arrivare fino alle foci dell'Ebro, dovendo poi risalire la costa fino a Barcellona.
11.14 Revisione della Velocità al suolo
La Velocità al suolo o Grond Speed (GS), viene determinata in sede di pianificazione, come già visto in precedenza, partendo dalla conoscenza o dalla stima di alcuni parametri. Questi sono:
livello di volo o quota di crociera;
IAS o MACH di crociera;
Vento e temperatura prevista alla quota di crociera;
Rotte e distanze tra i punti:
Per mezzo del regolo Jeppesen si calcola la TAS, quindi utilizzando il retro del regolo, si determina la GS per ogni singola tratta.
Durante il volo occorre procedere ad una verifica della bontà dei calcoli effettuati a terra: in generale il parametro più importante da verificare durante il volo in aerovia, è la GS, che può essere determinata direttamente mediante successive letture del DME, quando si vola in avvicinamento o in allontanamento da una stazione VOR-DME su Radiale costante, come precedentemente illustrato, oppure per mezzo di una semplice divisione: conoscendo la distanza tra due punti di sorvolo, ed avendo misurato il Tempo necessario per percorrere la suddetta distanza, si applica la formula:
Velocità = Spazio / Tempo
in questo modo ricavando la Velocità media tra i due punti.
Dal confronto della GS reale con la GS prevista si procede ad una valutazione della bontà delle previsioni del Vento; dal confronto della TAS con la GS misurata in volo si può risalire alla componente di Vento in Prua.
Il tipo di ragionamento e le modalità di calcolo sono identiche anche per la revisione della GS durante un volo a vista; anche in questo caso, data la distanza tra due punti sorvolati ed il Tempo impiegato è immediato il calcolo della GS.
Nel caso della Navigazione stimata si può procedere alla revisione della GS soltanto dopo essere riusciti a determinare un Fix. Dal confronto della Posizione stimata con il Fix, si può risalire agi errori commessi nella valutazione del Vento, e quindi procedere nella stima con dati migliori per quello che riguarda i punti successivi.
11.15 Correzioni di Rotta
Per le correzioni di Rotta valgono considerazioni analoghe a quelle effettuate nel paragrafo precedente per quello che riguarda la GS. Durante i voli condotti in aerovia, con riferimento a Radiali VOR, la Prua dovrà essere corretta adeguatamente in modo da mantenersi sul Radiale previsto, usando l'angolo di correzione di volta in volta necessario: non vi è pertanto la necessità di un calcolo numerico del valore della componente trasversale, in quanto questa viene automaticamente corretta con le normali tecniche di pilotaggio manuale o automatico.
Nel corso della Navigazione a vista, la Rotta viene seguita con riferimento visivo alle fattezze della superficie sorvolata: l'angolo di correzione della Rotta è quindi una conseguenza del voler dirigere l'aereo verso una Posizione sulla Terra individuata otticamente, e non una premessa per ottenere lo spostamento dell'aereo lungo una direzione desiderata.
Esattamente il contrario avviene nel caso della Navigazione stimata: infatti non potendo verificare la Posizione dell'aereo né a vista, né con sistemi radioelettrici, l'angolo di Crab o Wind Correction Angle diventa di primaria importanza. Una volta arrivati in una zona che permette la determinazione di un Fix, occorre verificare se l'angolo di correzione del Vento applicato era corretto, e in caso contrario determinarne uno corretto, prima di tutto per rientrare in Rotta, e poi per rimanervi.
In questo caso è di primaria importanza lo stabilire il vettore Vento sia come direzione che come intensità, in quanto dal Fix è poi necessario effettuare un primo calcolo per il rientro in Rotta, e quindi un aggiornamento del Crab angle e della GS anche per i segmenti di Rotta successivi.
11.16 Calcolo della direzione e della Velocità del Vento
Per il calcolo della direzione e della Velocità del Vento si può procedere graficamente, sulla Carta, come già illustrato in precedenza.
Occorre ricordare solamente che il moto assoluto al suolo dell'aereo è dato dalla somma vettoriale del moto proprio dell'aereo rispetto all'aria, e del Vento.
Il Vento può quindi essere ricavato per differenza tra il vettore assoluto ed il vettore proprio.
W = Vs - Va
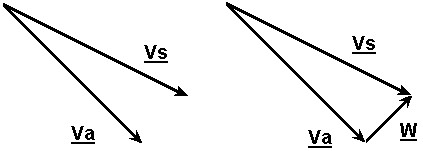
Possiamo anche risalire al vettore Vento partendo dalla componente lungo la Rotta e dall'angoIo di Crab, utilizzando la faccia dedicata ai calcoli trigonometrici del regolo Jeppesen.
11.17 Revisioni di ETO e di ETA
Durante il volo, a seguito dei periodici controlli della Posizione e della GS, è bene verificare l'attendibilità degli orari stimati di sorvolo dei punti successivi, alla luce dei dati disponibili più attendibili. Occorre ricordare che nelle aree non sotto Controllo Radar, i controllori di volo separano il traffico in base agli orari stimati di sorvolo delle Radioassistenze che vengono comunicati via radio dai piloti ai centri di Controllo del Traffico Aereo. Ogni stima che differisca per più di tre minuti dall'orario precedentemente comunicato, deve essere immediatamente segnalata, al fine di prevenire possibili conflitti di traffico. Si può quindi comprendere che la Sicurezza del Volo dipende anche in misura non secondaria dalla precisione con cui viene portata avanti la Navigazione.
Il Tempo Stimato di Arrivo (ETA), è anch'esso soggetto a variazioni in funzione del progredire del volo.
Ad esempio, incontrando un Vento frontale più intenso di quello previsto, tutti gli ETO subiranno un certo ritardo, che si ripercuoterà anche sull'ETA.
11.18 Verifica del carburante in volo
Il carburante necessario per volare dall'aeroporto di partenza a quello di arrivo è chiamato "Trip Fuel". Questo è ottenuto sommando il carburante necessario per la Salita, quello per la Crociera e quello per la Discesa.
Naturalmente questa quantità di carburante non è sufficiente per iniziare il volo, in quanto devono essere prevista delle riserve, che possono essere utilizzate in volo a seconda delle necessità.
Per quanto riguarda la salita e la discesa, il valore di carburante è facilmente ottenibile da apposite tabelle, che tengono conto del peso dell'aereo, del livello di volo, dell'eventuale uso dell'antighiaccio.
Per la fase di crociera si hanno delle tabelle, che, in funzione del peso, del livello di volo, della Velocità mantenuta, della temperatura e dell'eventuale uso dell'antighiaccio, forniscono il valore del consumo orario, oltre ad altri dati utili.
Avendo calcolato il Tempo per percorrere ogni singolo segmento della Rotta, si potrà determinare il carburante relativo. Sommando tutti i valori di carburante ottenuti, si ricaverà il trip fuel.
Dalla somma di questo e del carburante di riserva si otterrà il carburante minimo necessario per iniziare il volo.
Sul Piano di volo va indicato, punto per punto il carburante minimo residuo necessario per raggiungere la destinazione con la quantità richiesta come riserva.
Durante il volo è richiesta la periodica verifica del carburante residuo, al fine di valutare il regolare andamento dei consumi.
11.19 Determinazione della Posizione nella Navigazione stimata
Esaminiamo il caso di un aereo che intende procedere lungo la Rotta ABC (Figura 11.21).
Supponiamo che dopo un certo Tempo si proceda alla determinazione di un Punto, e che questo sia il punto X indicato sul disegno. L'aereo è evidentemente fuori Rotta, avendo percorso una Rotta diversa da quella pianificata, e in particolare spostata verso Sud. Il problema per la continuazione della Navigazione stimata è quello di proseguire in modo da sorvolare il Punto B, e quindi di determinare una Prua che consenta all'aereo di procedere con esattezza verso il Punto C.
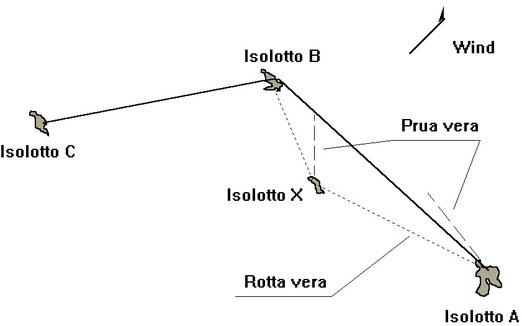
Supponiamo che l'ultimo Punto determinato con esattezza sia il punto A della Figura, e che a causa di un Vento da Nord si sia determinata una Prua da mantenere angolata verso destra rispetto alla Rotta desiderata.
La Prua mantenuta è rappresentata nell'illustrazione dalla linea tratteggiata.
Evidentemente la Prua selezionata, o non era sufficientemente angolata rispetto alla Rotta per contrastare efficacemente l'azione del Vento, oppure questo era stato valutato di intensità inferiore a quello effettivo, oppure anche è possibile che il Vento sia aumentato di intensità dopo che l'aereo aveva lasciato il punto A. Qualunque sia il motivo, il risultato è che l'aereo ha percorso una Rotta diversa rispetto a quella prevista. L'angolo tra la Course e la Track può essere facilmente individuato mediante misurazione diretta sulla Carta.
È chiaro che se si fa assumere all'aereo una Prua più angolata rispetto al Vento di una quantità pari all'angolo che esiste tra la Course e la Track, l'aereo smetterà di scarrocciare sottovento, e seguirà una Rotta parallela alla Rotta desiderata. Per rientrare in Rotta, è quindi necessario virare in direzione del Vento, in modo da assumere una Prua che rispetto a quella mantenuta precedentemente, abbia un angolo di correzione almeno doppio rispetto all'angolo di deriva rilevato.
Impostando un angolo di correzione pari al doppio dell'Errore, si rientrerà in Rotta dopo un Tempo pari a quello che è stato impiegato per percorrere il tratto AX. Al fine di rientrare in Rotta in un Tempo pari alla metà di quello impiegato per percorrere il tratto AX, occorrerà mettere un angolo di correzione pari al triplo dell'Errore commesso.
Se si vuole invece rientrare in Rotta direttamente sul punto B, e da lì proseguire poi direttamente per C, occorre allora procedere alla effettiva determinazione del vettore Vento, in tutte le sue componenti, risolvendo il Triangolo del Vento per la Tratta AX, e poi, con il nuovo dato del Vento, occorre procedere al calcolo della Prua da mantenere nel tratto XB, aggiornando opportunamente i calcoli effettuati in pianificazione.
11.20 Ripianificazione in caso di necessità
Esiste sempre la possibilità che durante il volo si presentino delle necessità tali da impedire il regolare proseguimento del volo per la destinazione originariamente prevista.
Il caso più semplice si presenta quando l'aeroporto di destinazione si chiude per esempio per cause meteorologiche.
Si pianifica sempre anche per gli aeroporti che vengono prescelti quali alternanti, e quindi a bordo, già scritti sul piano di volo si hanno tutti gli elementi per proseguire oltre la destinazione con tutti i calcoli di distanza, quota e consumo già fatti, anche se i dati vengono presentati in maniera abbastanza sintetica.
Quando invece l'esigenza si presenta improvvisamente, non c'è il tempo di effettuare calcoli troppo lunghi. La cosa importante è quella di stabilire se c'è a bordo una quantità sufficiente di carburante per raggiungere la nuova destinazione. Se il carburante non è critico, si può trascurare qualsiasi calcolo, dedicando l'attenzione esclusivamente alla condotta dell'aereo.
In caso di dubbio, invece occorre come minimo fare riferimento alle Tabelle di crociera, onde valutare il consumo orario per la configurazione e la quota di volo (per esempio Tabelle di controllo dei consumi con un motore in avaria).
Occorre anche fare un calcolo sull'influenza che il Vento avrà sulla GS sulla nuova Rotta che si intende seguire, al fine di determinare il Tempo necessario per raggiungere la nuova destinazione ed avere un'idea abbastanza precisa delle riserve che si prevede di avere a bordo una volta giunti sull'aeroporto su cui avviene la diversione.
Nel caso in cui si abbia un pò di tempo a disposizione si può effettuare una chiamata radio in HF tramite Berna Radio, Stocholm Radio, ARINC negli USA, ecc, in modo da mettersi in contatto radiotelefonico con la base di armamento, al fine di ottenere un "Redispatch Flight Plan".
È detto "Redispatch Fight Plan" quello mediante il quale sono calcolati combustibile e Tempo per procedere da un Punto in crociera verso una destinazione, in alternativa alla pianifcazione originaria.
Le informazioni ottenute possono anche essere usate solamente per una valutazione agli effetti di una ripianifcazione rispetto a quella originaria.
Il "Redispatch Fight Plan" può essere adottato per ripianificare un volo:
alla destinazione originale con un percorso diverso;
alla destinazione originale con un diverso profilo verticale;
ad una nuova destinazione;
con un nuovo alternato o senza alternato;
con nuovi dati meteorologici;
con un diverso tipo di crociera.
È valida ogni combinazione delle opzioni precedenti.
Nota: la ripianificazione in volo è possibile, per il momento, solo per una condizione all-engines.
Il Comandante trasmette all'addetto le informazioni essenziali per una corretta ripianificazione, utilizzando un apposito modulo che gli serve come guida.
A calcoli effettuati, l'addetto trasmette i dati di ripianificazione secondo la sequenza riportata sul medesimo modulo.